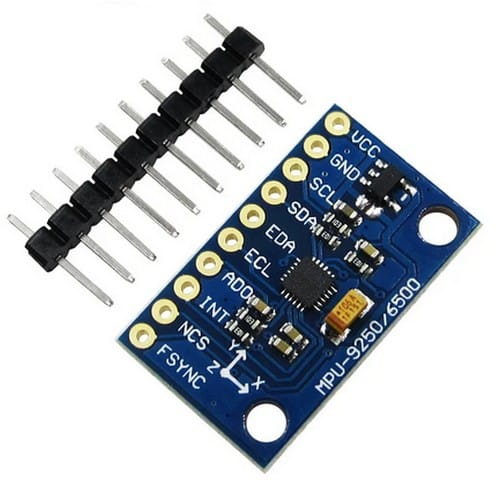
Nous allons réaliser un quadricoptère utilisant comme contrôleur de vol une carte programmable Arduino associé à un gyroscope 3 axes.
Le micro-contrôleur permet, à partir d'événements détectés par des capteurs, de programmer et commander des actionneurs
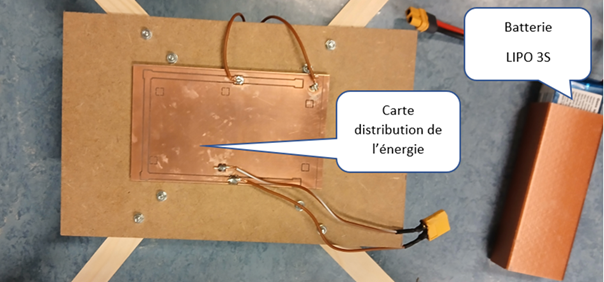
L’alimentation sera confiée à une batterie LIPO 3S (3x3,7V).
Une liaison radio 2,4GHz sera confié à un système émetteur-récepteur de marque SPECTRUM
Les moteurs sont de type 2212 KV1000 ils sont associé à des contrôleurs 30A.
Le châssis sera réalisé avec des tasseaux de pin et des planches de MDF 3mm, l’assemblage utilisera un ensemble vis-écrou M3.
Nous devons concevoir une carte « distribution de l’énergie » qui permettra d’alimenter en 12V les 4 moteurs ainsi que la carte Arduino, le gyroscope et le récepteur radio.
Le support batterie sera réalisé en impression 3D.
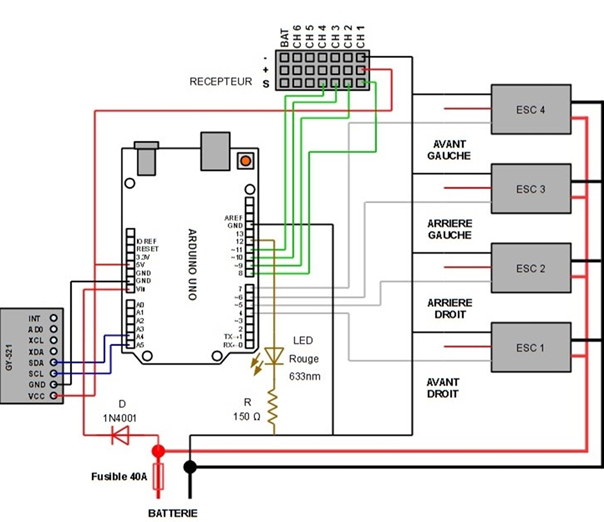
Nous devons concevoir également une carte interfaçage qui assurera les liaisons entre la carte Arduino, le récepteur, le gyroscope et les 4 moteurs.
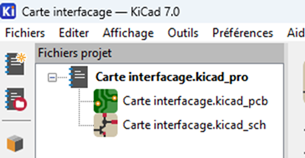
Utilisation de la suite logiciel KICAD
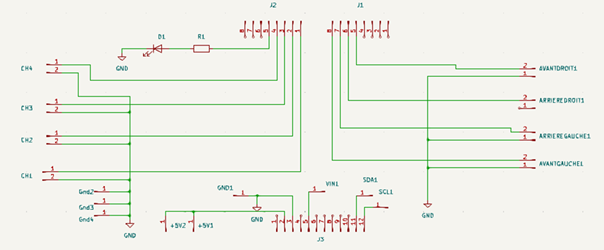
Réalisation du schéma structurel :
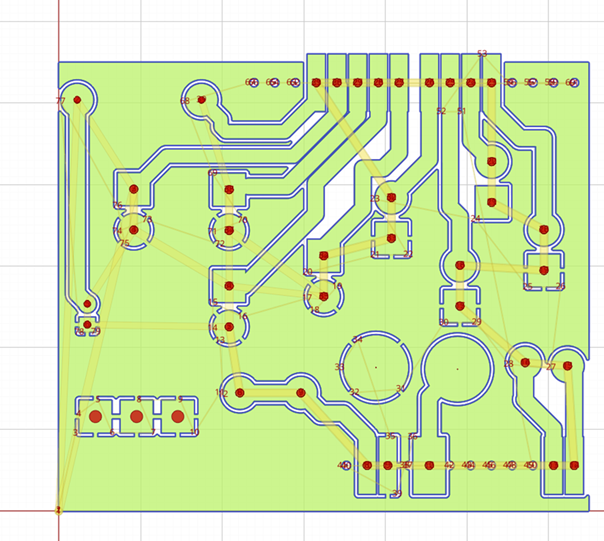
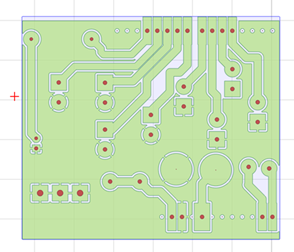
Réalisation du PCB :
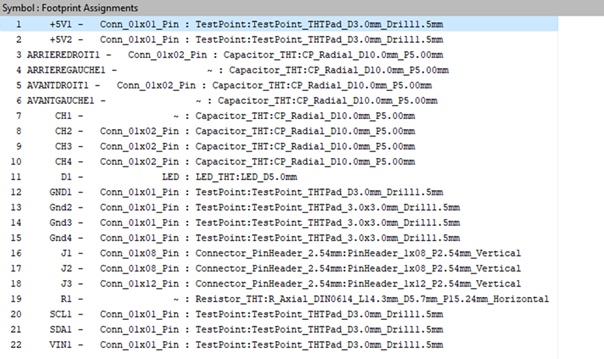
Voici les empreintes à utiliser
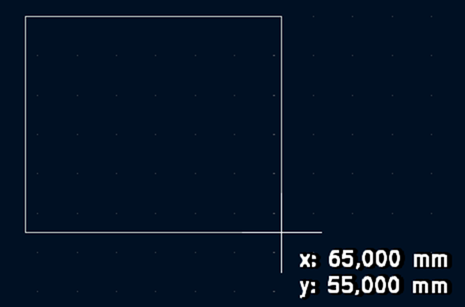
La taille de la carte :
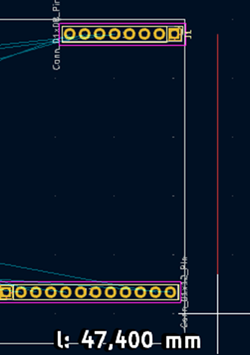
Il faut respecter 47,400mm entre le centre des trous des borniers du haut et du bas de la carte :
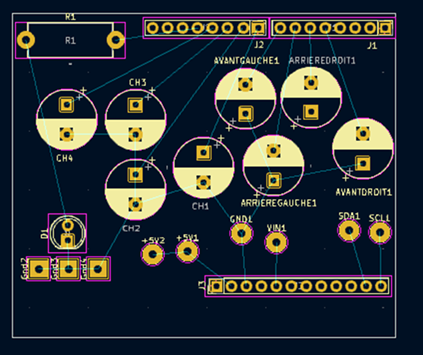
Exemple d’implantation :
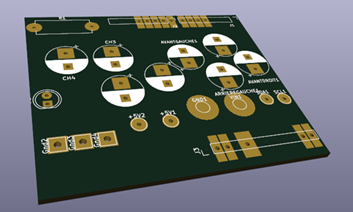
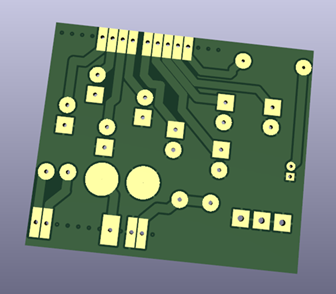
Visualisation 3D sous KICAD :
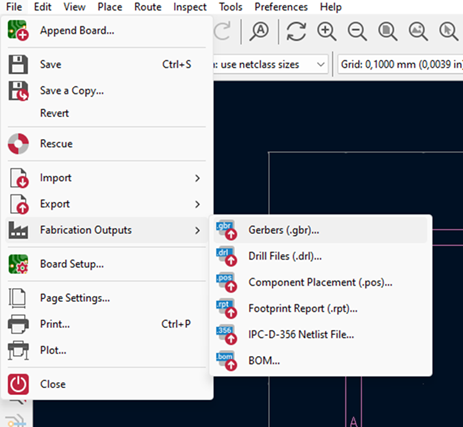
On demande de générer les fichiers de fabrication gerber et exellon :
Nous allons ensuite générer les fichiers GCODE (.NC) qui permettront de réaliser la carte avec la graveuse CNC :
Utilisation du logiciel Flatcam :
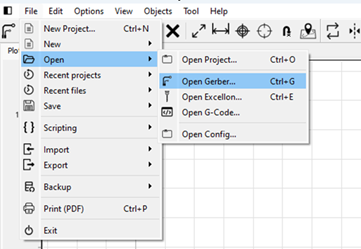
Ouvrir tout de suite le fichier exellon
Et faire un miroir sur l’axe Y
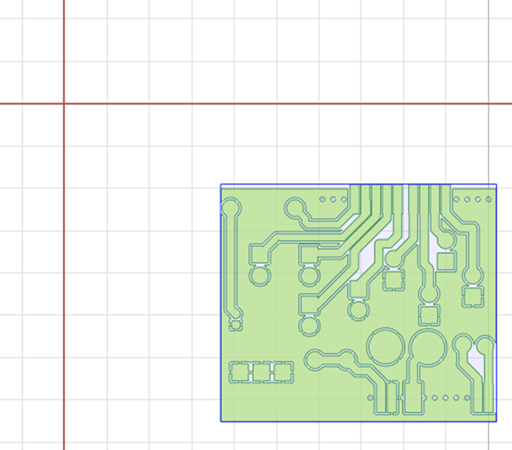
Le projet n’est pas placé à l’origine des axes il faut donc sélectionner et cliquer sur :

Vous obtenez :
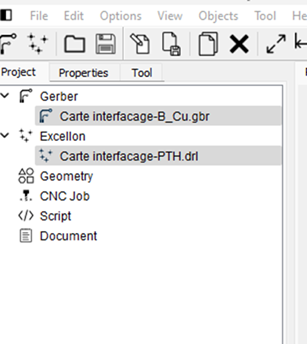
Cliquez sur le fichier .grb
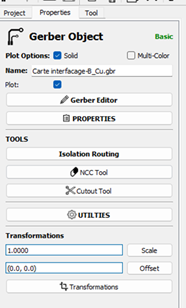
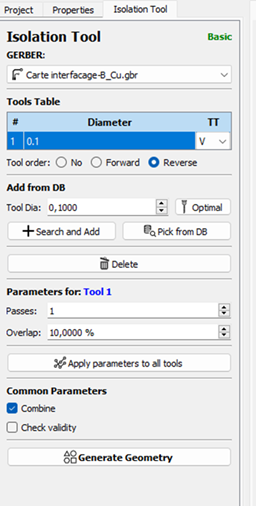
generate geometry
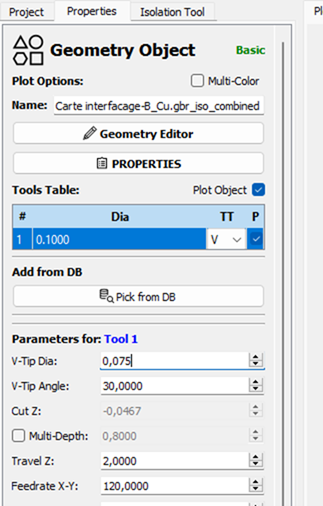
Profondeur de passe 46microns
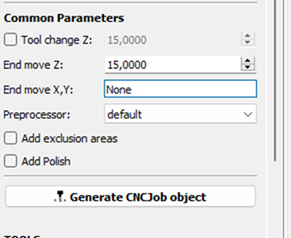
Cliquez pour générer le fichier GCODE (.NC)
Nous allons maintenant générer le fichier de perçage :
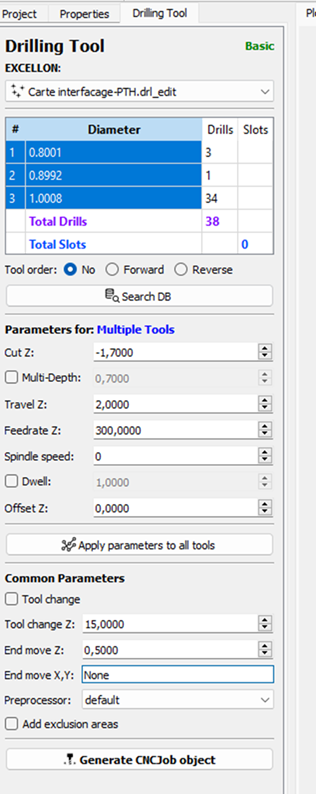
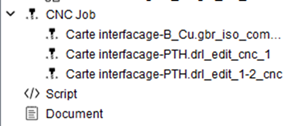
Les 3 fichiers celui des pistes et ceux de perçage.
Sauvegardez ces 3 fichiers pour graver et percer la carte. (un fichier pour 0,8mm et un pour 1mm)